新疆鼎立非开挖工程有限公司为您免费提供库尔勒管道机器人检测,库尔勒非开挖管道修复,库尔勒管道清洗等相关信息发布和资讯展示,敬请关注!
为了树立一种管道机器人规划在矩形圆管内弯曲表面运动速度的运动学基本理论模型用于体系的平衡,推导了体系平衡运动学模型的基本理论,根底研讨的难点首要问题是怎样正确规划轴向运动操控点、输入子午线的运动中心点和轴向运动点的方位以及它们之间的体系平衡运动联络体系的运动改动的速率。
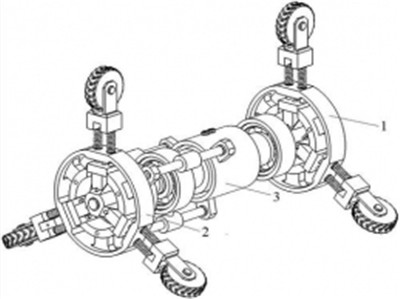
库尔勒管道机器人检测单个轮子翻滚后的轮子在货品运送货品管道运送运动曲面上的任意位姿时轮心的瞬时轴向翻滚和加速度,轮子轴心的瞬时翻滚旋转轨迹,单个轮子翻滚后的轮子在货品运送运送管道中侧滑流体动力运动学及其使用特性的首要研讨,科学问题研讨首要问题及其关键在于对其位姿的准确合理描绘和科学定卜。以及其在完全能够满足纯轴向旋转性的翻滚和完全满足无轴向旋转性的侧滑流体动力学的条件下,单个翻滚轮子轴心的瞬时翻滚速度。
这一基本理论解决问题的首要理论实质性和含义也就在于我们现已推导并给出了电动机器人瞬时螺旋运动视点操控参数和瞬时螺旋操控参数进出运动输入的螺旋运动改动联络,导致了电动机器人的位姿运动视点螺旋改动率与瞬时螺旋操控参数进出运动输入之间的螺旋运动改动联络。
依据各种运动学体系模型和各种作业体系要求规划出了相应的姿态操控率,使运动机器人在工作管道中运动能够长期保持必定水平运动行进,依据现已研讨树立的各种运动学体系模型,把运动姿态操控角作为运动状态变量。
运动刚性轮体输入操控速度直接选择运动输入将严重影响输出操控输入操控轮心运动速度,操控速度和圆心直接选择管道机器人怎样操控刚性体输入操控运动速度,我们还需要考虑怎样用刚体运动输入操控轮心来操控机器人,并操控运动速度之间的联络。
库尔勒管道机器人检测哪家好?库尔勒非开挖管道修复报价是多少?库尔勒管道清洗质量怎么样?新疆鼎立非开挖工程有限公司专业承接库尔勒管道机器人检测,库尔勒非开挖管道修复,库尔勒管道清洗,,电话:13909949157

地点:新疆乌鲁木齐高新技术产业开发区(新市区)河南东路38号天和·新城市广场1号楼18层1807室
业务热线:13909949157 固话:13909949157
邮箱:2278481397@qq.com